尝试第一次优化 Kernel
1. 多线程计算
在《手写第一个 Kernel》 章节中,我们实现了两个 1D 张量的最朴素版本的 CUDA kernel:
__global__ void add_kernel(float *x, float *y, float *out, int n){
for (int i = 0; i < n; ++i) {
out[i] = x[i] + y[i];
}
}
int main(){
//...
add_kernel<<<1, 1>>>(cuda_x, cuda_y, cuda_out, N);
//...
}
从代码中可以看出,我们是通过<<<1, 1>>>方式拉起了 add_kernel ,意味着我们只是利用了 1 个线程,从起点 0 → n 依次遍历张量数据做加法操作,这个完全没有利用 GPU 并行计算的优势。
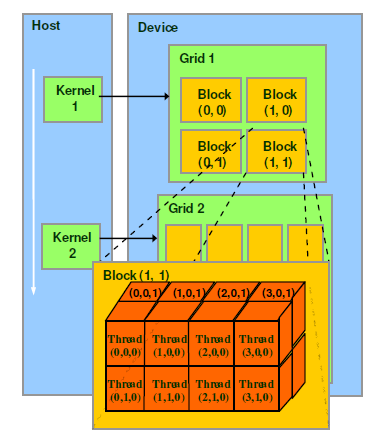
这里我们再复习下 <<<M, T>>> 的含义:三尖括号告诉 CUDA 在使用多少个 thread 拉起 kernel。多个线程一组成为 thread block,多个thread block一组成为 grid。因为前面的 M 表示一个 grid 有 M 个 thread block, 一个 thread block 里有 T 个 thread。
我们首先将上面的 kernel 升级为多线程版本,即类似 add_kernel<<<1, 256>>>。CUDA 提供了一些内建的变量来访问线程相关的信息,比如:
threadIdx.x: 指此线程在thread block中的下标位置blockDim.x: 指一个thread block中的线程数
对于 add_kernel<<<1, 256>>> 而言,threadIdx.x 取值为 0~256 中的某个值,blockDim.x 的值为 256。
如果要将 N = 10000000 切分到 256 个线程里并行去计算,需要调整下 add_kernel 中的 for 语句的写法,实现同一份代码在被不同线程调用时,自动地各自计算各自的数据,首先改成如下的范式:
__global__ void add_kernel(float *x, float *y, float *out, int n){
int index = 0;
int stride = 1;
for (int i = index; i < n; i += stride) {
out[i] = x[i] + y[i];
}
}
每个线程从下标 index 开始遍历到 n,步长间隔为 stride,然后循环计算。为了让 256 个线程独立计算,我们只需要设置 stride = 256,然后每个线程计算的 index 是各自所在的 threadIdx.x 下标位置即可(取值范围为[0, 256)),如下图所示

则上述 add_kernel 的最终版本实现为:
__global__ void add_kernel(float *x, float *y, float *out, int n){
int index = threadIdx.x; // 当前线程所在的下标位置
int stride = blockDim.x; // 此样例中为 256,由<<<1, 256>>>自动传递过来
for (int i = index; i < n; i += stride) {
out[i] = x[i] + y[i];
}
}
完整的代码可以参考文件:vector_add_thread.cu。
编译命令:nvcc ./vector_add_thread.cu -o add_thread,执行和 Profile 命令: nvprof ./add_thread,结果如下:
==36546== Profiling application: ./add_p
==36546== Profiling result:
Type Time(%) Time Calls Avg Min Max Name
GPU activities: 46.76% 29.188ms 1 29.188ms 29.188ms 29.188ms [CUDA memcpy DtoH]
29.62% 18.485ms 2 9.2425ms 9.2208ms 9.2642ms [CUDA memcpy HtoD]
23.62% 14.745ms 1 14.745ms 14.745ms 14.745ms add_kernel(float*, float*, float*, int)
相对于《手写第一个 Kernel》 章节中的性能提升:
| 耗时 | 加速比 | |
|---|---|---|
| 单线程 | 570 ms | - |
| 多线程 | 14.7 ms | 38.7x |
2. 多网格计算
上面我们只用到了 1 个 Thread block 就实现了 38 倍的加速比。接下来我们再看如何改为多个 Thread block 的版本。
一般而言,GPU 显卡上包含了很多流式处理器(即 Streaming Multiprocessors,简称 SMs),其中每个 SM 都包含了多个并行处理单元,均支持并发地执行多个 thread block。只有将 Kernel 放在多个 thread block 上去执行,才能最大限度地利用 GPU 并行加速的能力。
巧的是,CUDA 也提供了一些内建变量访问 block 相关的信息:
blockIdx.x: 指当前 thread block 在网格(grid)中的下标位置gridDim.x: 指网格(grid)的大小(size)
同样的,我们么只需要修改 add_kernel 中的实现,确保每个 thread 都各自独立做计算即可,我们期望每个线程都只做 1 个浮点数的加法操作,也就意味着我们期望在 N = 10000000 个线程上并发地同时计算,切分示意图如下:

其中,每个 thread block 包含的线程数依旧为 256,则需要 N/256 个 thread block,即 grid size = N/256:
__global__ void add_kernel(float *x, float *y, float *out, int n){
// blockIdx.x 为当前 thread 所在的 block 在网格 grid 中下标索引,取值为[0, N/256)
// blockDim.x = 256,为每个 block 中包含的线程数
// threadIdx.x 为当前 thread 所在 block 的下标索引,取值为 [0, 256)
int tid = blockIdx.x * blockDim.x + threadIdx.x;
// 这里必须加判断,因为有的 thread 算出来的 tid 可能大于 n, 让它空跑就可以了
if(tid < n) {
out[tid] = x[tid] + y[tid];
}
}
完整的代码可以参考文件:vector_add_grid.cu。
编译命令:nvcc ./vector_add_grid.cu -o add_grid,执行和 Profile 命令: nvprof ./add_grid,结果如下:
==32660== Profiling application: ./add_g
==32660== Profiling result:
Type Time(%) Time Calls Avg Min Max Name
GPU activities: 63.20% 29.522ms 1 29.522ms 29.522ms 29.522ms [CUDA memcpy DtoH]
36.47% 17.036ms 2 8.5178ms 8.4890ms 8.5466ms [CUDA memcpy HtoD]
0.33% 152.61us 1 152.61us 152.61us 152.61us add_kernel(float*, float*, float*, int)
相对于《手写第一个 Kernel》 章节中的性能提升:
| 耗时 | 加速比 | |
|---|---|---|
| 单线程 | 570 ms | - |
| 多线程 | 14.7 ms | 38.7x |
| 多 block | 0.153 ms | 3725x |